UAV getragene Sensorik zur KI-basierten Unterstützung von Rettungsmissionen
| Leitung: | Prof. Dr.-Ing. Bernardo Wagner |
| Team: | Julian Kunze, Jan Michel Rotter |
| Jahr: | 2021 |
| Förderung: | BMBF |
| Laufzeit: | 2021-2023 |
Motivation: Catastrophic events such as explosions, natural disasters or terrorist attacks often lead to severe structural damage to buildings and tunnels. In the act, people might get buried or trapped. Due to tremendous time pressure, search and rescue teams promptly require an overview of damaged and close-to-collapse sites in order to locate and recover missing persons timely without endangering their lives. For this task, the UAV-Rescue project aims at developing a UAV-based sensor system. This system can be deployed in buildings or tunnels for the acquisition of a complete 3D indoor map as well as the detection of potential vital signs.
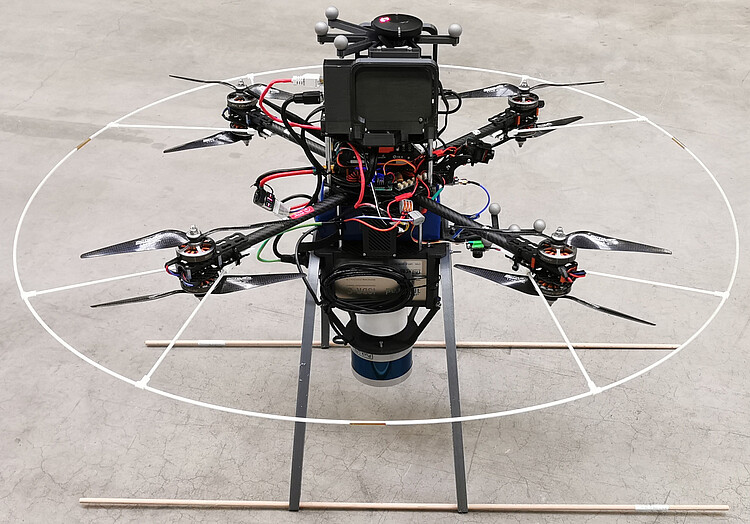
Functionality: The UAV carries a 3D laser scanner as well as a 3D millimetre wave scanner. These sensors are used for both, the mapping of the environment and vital sign detection. For the localization and mapping, we aim at fusing both sensor modalities so that the UAV is able to navigate under harsh environmental conditions (e.g. smoke and dust). We also research semi-autonomous exploration algorithms in order to support the search for missing persons. For this purpose, we intend to derive exploration strategies from human expert intuition. For both, sensor fusion and navigation, we plan employing novel machine learning approaches.



