SmokeBot
| Leitung: | M. Sc. Paul Fritsche, M. Sc. Björn Zeise, M. Sc. Patrick Hemme |
| Jahr: | 2015 |
Starting in January 2015, SmokeBot is a project funded by the EU within the scope of the Horizon 2020 program. It is being realized together with partners from Sweden, Austria and United Kingdom, as well as Fraunhofer Institute for High Frequency Physics and Radar Techniques. The aim of SmokeBot is to improve the environment perception of mobile robots in scenarios with low visibility. L3S is responsible for research topics like sensor data fusion (light based sensors and radar), thermography, (hazard) situation analysis and information modeling.
Motivation
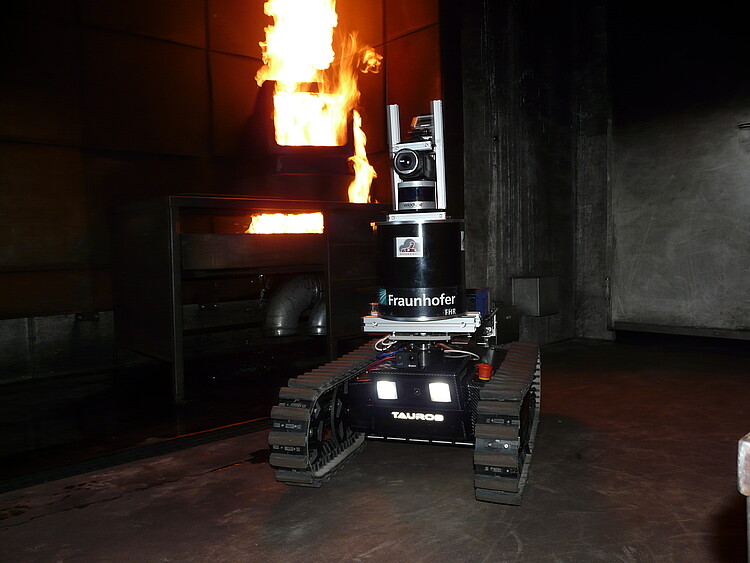
Harsh conditions such as rain, snow and fog and situational occurrences, e.g. fire-related smoke and dust, significantly decrease quality and usability of traditional, light based sensor modalities. Robots for emergency response and disaster management will satisfy an upcoming field with a high demand of risk reduction for first responder personnel as well as reduced mission costs. These applications require new perceptual and cognitive robotic capabilities. Limits of traditional sensors for tasks of dealing with only partial or erroneous information as well as mechanical, electronic and thermal robustness restrict the use of current robotic platforms.
SmokeBot video
The aim of SmokeBot was to improve the environment perception of mobile robots in scenarios with smoke. Existing sensor technology as LiDAR and RGB cameras cannot cope with such demanding conditions. The focus is on civil robots supporting fire brigades in search and rescue missions, e.g. in post-disaster management operations. Here you can see our SmokeBot video.
SmokeBot website (incl. all project-related publications): http://smokebot.eu/
Article: SMOKEBOT undergoes a trial by fire



